MATERIALES
Como indicamos previamente, en esta página haremos un dron tipo cuadricóptero. Para ello, podemos clasificar los materiales en dos categorías: materiales estructurales y materiales electrónicos. Los primeros serán los que conformarán la parte mecánica de nuestro aparato, brindando tanto soporte como las características aerodinámicas requeridas. La parte electrónica tendrá varios componentes, entre sensores, actuadores y el "cerebro" de nuestro aparato.
A continuación veremos el desglose de estos materiales requeridos, así como el funcionamiento de cada uno de ellos.
NOTA: Si estás en Colombia, puedes visitar directamente nuestra mini-tienda (CLIC ACÁ), donde encontrarás algunos de ellos y podrás de paso apoyar nuestro proyecto.

Materiales estructurales
En esta categoría debemos contar con los siguientes materiales:
- Soporte
- Hélices (4 en total)
Ahora veremos la descripción en detalle de cada uno de estos.
Soporte
Como su nombre lo indica, será el componente que conforme la estructura principal y dé sustento a todos los demás componentes de nuestro dron. En mis diseños personales he usado dos tipos de soporte, que pongo a consideración del lector para que use al que más le convenga.
La opción más popular cuando se trata de construir drones propios es usar un marco armable como el que se aprecia en la figura 2. Este marco fue desarrollado originalmente por DJI, pero hoy existen muchas réplicas de excelente calidad y resistencia. El marco se puede ensamblar y desarmar fácilmente; adicionalmente provee los agujeros para el montaje de los motores y viene con caminos de distribución de potencia ya incorporados (son los cuadrados dorados en la foto, aunque no todos son visibles), lo cual es de mucha utilidad en el montaje de la electrónica. En resumen, si se quiere una opción práctica, resistente y fácil de montar, este sería el marco a utilizar. Es importante tener en cuenta que vienen en tamaños predefinidos (el de la foto se llama F330, por sus 330 mm de diagonal), por lo que es importante saber el tipo de rotores que se van a utilizar para tener el marco adecuado. Una buena medida de referencia para los tamaños de marcos y hélices más populares es la siguiente: para hélices de 8" usar el marco F330, para hélices de 10" usar el marco F450.


También es posible utilizar un marco de madera para nuestro dron. En mi trabajo con estas aeronaves construí prototipos con estos marcos como el que se observa en la figura, que aunque rudimentario, resultó bastante bien para las pruebas y los vuelos iniciales. Desde luego, su resistencia no es comparable con el marco de fibra de vidrio, y tras un golpe fuerte posiblemente resultará averiado. Sin embargo, es bastante barato y no será mucho problema de reemplazar. Al mismo tiempo, es posible diseñarlo con un mayor espacio en la parte central que nos permitirá acomodar de una manera más libre los elementos de electrónica como la tarjeta de control y los sensores que deseemos instalar.
Hélices
También conocidos como rotores o palas, son el elemento más importante en cuanto a la aerodinámica de nuestro cuadricóptero. Evidentemente, el número requerido es cuatro, de las cuales requerimos dos pares en sentidos opuestos (en el mercado se conocen como rotores CW y CCW por "clockwise" y "counter-clockwise" respectivamente, o "de giro en sentido horario" y "giro en sentido anti-horario", en castellano). Sin embargo nunca está de más (de hecho es altamente recomendado) contar siempre con respuestos, pues es un elemento propenso a dañarse por los choques, especialmente en los primeros vuelos.
Existe gran variedad de hélices en el mercado, teniendo varios factores diferenciales como el material o el tamaño. En cuanto al primero, hay de diversos tipos como plástico, nylon, fibra de carbono e incluso madera. En cuanto al tamaño, igualmente hay gran variedad en función del tamaño y función del dron a construir. Lo importante a conocer es la denominación de las hélices: usualmente vienen con una denominación de cuatro cifras, como 5030 o 1045. En este caso el primer par de números indica la longitud de la hélice de punta a punta en pulgadas (50 sería 5.0, mientras 10 es en efecto 10), mientras el segundo par representa el avance o "pitch" de la pala en grados (30 y 45 para los ejemplos mencionados). Nuevamente resalto la importancia de que haya una concordancia entre el tamaño del marco y el de las hélices a utilizar. Adicionalmente, surge un nuevo parámetro a tener en cuenta: hay que asegurarse de que las hélices sean también apropiadas para el motor a utilizar. Por un lado el agujero central debe ser consistente con el eje del motor escogido (nótese en la figura que muchas hélices son suministradas con anillos adaptadores para este propósito); por otro lado el tamaño de la hélice debe corresponder a la potencia del motor para obtener un rendimiento adecuado de la aeronave.

Materiales electrónicos
En esta categoría debemos contar con los siguientes materiales:
- Motores (4 en total)
- Variadores de velocidad (4 en total)
- Tarjeta de control
- Sensor inercial
- Módulo de comunicación
- Batería
- Tarjeta de distribución
Ahora veremos la descripción en detalle de cada uno de estos.
Motores
Como en todo, existen diferentes clases de motores según la aplicación (y el presupuesto). En particular, para drones del nivel de desarrollo como el que aquí construiremos, se suelen considerar dos tipos de motores: DC con escobillas y sin escobillas o "brushless". Los primeros se suelen usar solo en los drones muy pequeños y de bajo costo. Su ventaja es su pequeño tamaño en general, así como su facilidad de operación, pues simplemente reciben un voltaje DC hasta cierto nivel y en función del mismo producen una velocidad de salida proporcional. Sin embargo, usualmente requieren una caja reductora para producir un torque capaz de mover las hélices, así como tienen un mayor y más rápido desgaste debido a sus escobillas, pues con cada rotación existe un contacto entre partes mecánicas.
La opción más popular y recomendada es el uso de motores "brushless", los cuales se componen de dos partes principales, una es el estator, donde se haya el bobinado con un numero determinado de polos, y la otra parte es la campana, que es la parte móvil y en la que van alojados los imanes. Al estator se envían impulsos eléctricos, los cuales repelen los imanes situados en la campana, conmutando entre unos y otros a gran velocidad para producir el giro continuo de esta. Por tanto, se tiene como gran ventaja que no hay partes mecánicas en contacto con otras para producir el giro del motor, lo cual posibilita que tenga una larga vida útil en comparación con un motor DC convencional. Igualmente, el torque producido es lo suficientemente alto para conectar el eje directamente a la hélice respectiva. Sin embargo, la señal eléctrica requerida para la operación es una señal trifásica de alta frecuencia, la cual no es sencilla de generar. Por tanto, se requiere un elemento intermedio entre el suministro de potencia y el motor, conocido como variador de velocidad o ESC, del cual nos ocuparemos más adelante.
En la mayoría de los motores, junto al modelo del motor aparece una numeración muy importante para identificar sus características. Inicialmente, aparecen cuatro dígitos estilo 2205 o 2306, lo cual indica el tamaño del estator en milímetros, donde los dos primeros dígitos señalan su diámetro y los dos siguiente su altura del estator. El siguiente dato importante son las KV, este número nos indica las revoluciones por minuto (RPM) del motor sin carga, y es el numero indicado multiplicado por el voltaje a utilizar. Cuantas mayor sea el número KV, más revoluciones producirá el motor pero menos torque tendrá, por lo que tendremos que tener cuidado con las hélices que usemos. En el apartado siguiente, acerca de los variadores, presentaremos un método para escoger una acertada combinación motor-ESC-hélices.

Variadores
También conocidos como ESC (Electronic Speed Controller), son dispositivos requeridos para generar la señal eléctrica adecuada que requieren los motores "brushless" para su operación, a partir de una señal DC entregada por la batería del dron. Se componen de dos cables de entrada y tres cables de salida gruesos. Los primeros corresponden a la entrada de alimentación de la batería, mientras los segundos son la señal de salida hacia los motores. Adicionalmente cuentan con un conector con dos o tres cables notoriamente más delgados, los cuales van conectados a la tarjeta de control, de la cual se reciben los datos para mover el motor. El número de cables dependerá de si el ESC lleva incluido BEC (3 cables) o no (2 cables). Las siglas BEC significan "Battery Elimination Circuit", o Circuito de Eliminación de Batería, el cual permite alimentar los demás componentes electrónico (tarjeta de control, sensores, etc) a partir de este, eliminando la necesidad de un regulador o inclusive de una batería adicional.
El criterio más importante para la elección del variador es la corriente. Con base en la máxima corriente que, según información suministrada por el fabricante, requiera el motor para su operación, se debe seleccionar una variador que suministre un valor superior a dicha corriente.
En la sección de fabricación del dron de esta página trabajaremos con un conjunto de materiales ya predefinidos, que en mi experiencia hacen una buena combinación de hélices - motores - variadores (y batería, inclusive). El lector es bienvenido a trabajar con este conjunto de materiales recomendados; sin embargo, para aquellos que quieran conocer un poco más sobre los principios de selección de los materiales e inclusive hacer modificaciones a su propio criterio, recomiendo leer este enlace (ver enlace) y a su vez los temas contenidos en el mismo, que ofrecen excelente información sobre los materiales que hemos descrito y los criterios de selección a utilizar.

Tarjeta de control
Es el cerebro del dron; un elemento esencial para asegurar el funcionamiento de nuestra aeronave a través de la integración de todos los elementos que forman parte de ella. En el mercado existen infinidad de tarjetas controladoras para drones, algunas bastante buenas y que permiten gran integración de sensores y elementos adicionales para dotar a la aeronave de mayores funcionalidades sin requerir una nueva tarjeta. La verdad están bastante bien, pero, como es de suponer, con estas características vienen asociados costos mayores.
Para este proyecto no utilizaremos una tarjeta de control convencional. En su lugar haremos algo más interesante: utilizaremos una placa Arduino adaptada como controlador, en la cual nosotros mismos programaremos nuestro propio código para controlar el dron y nos aseguraremos de realizar el acondicionamiento necesario de las señales de alimentación, entrada (sensores) y salida (control de los motores).
Pero, ¿qué es Arduino? Probablemente la mayoría de los lectores ya conocen esta popular tarjeta, pero para aquellos que no, de manera resumida puede describirse como un sistema que acepta información en forma de señal de entrada, desarrolla ciertas operaciones sobre ésta y luego produce señales de salida. Es decir, es un sistema de desarrollo de hardware libre, basado en un microcontrolador (usualmente Atmel) con el cual se pueden hacer miles de proyectos electrónicos, de diferentes grados de complejidad. Desde luego, existen diferentes versiones de Arduino, que utilizan microcontroladores con diferentes capacidades de procesamiento y velocidades, así como con más o menos opciones de entradas y salidas, tanto analógicas como digitales. El lector es libre de escoger la versión de su preferencia; sin embargo acá se utilizará como base el Arduino Uno, ya que es probablemente la versión más popular de Arduino y por tanto fácil de conseguir, su precio es bastante accesible y tiene una capacidad de procesamiento así como de entradas y salidas adecuadas para el proyecto que realizaremos.
¿Por qué hemos decidido usar Arduino en vez de una tarjeta de control específica para drones? Aparte del factor costo, considero que el mayor nivel con el que se puede asimilar el funcionamiento de un dron es a través de un conocimiento real de cómo opera cada uno de sus componentes, lo cual lo podemos obtener precisamente con el uso de esta herramienta, donde para desarrollar nuestro código debemos conocer a fondo las particularidades de cada elemento, a un grado tal que posiblemente no lograríamos si solo usáramos una tarjeta pre-fabricada para la aeronave tipo "plug-and-play". Y por esta razón, el proyecto es más desafiante y a la vez divertido, y mil veces más gratificante cuando veamos el resultado final de nuestro trabajo. En todo caso en esta página ofreceremos diferentes niveles de detalle en las explicaciones, para que el lector pueda sumergirse a profundidad en el proyecto o no según el grado que le convenga.

Sensor inercial
Un dron puede contar con una gran variedad de sensores según sus prestaciones, pero hay uno fundamental que todos, incluso los más simples, deben tener. Se trata del sensor de medición inercial, o IMU (Inertial Measurement Unit), dispositivo electrónico que mide e informa acerca de la velocidad, orientación y fuerzas gravitacionales del aparato, usando una combinación de sensores inerciales. El tipo de sensores que contiene una IMU puede variar, pero en general el término IMU es usado ampliamente para referirse a una caja que contiene tres acelerómetros y tres giroscopios. Los acelerómetros, que miden la aceleración inercial, está colocados de tal forma que sus ejes de medición son ortogonales entre sí. Los tres giroscopios están colocados en un patrón ortogonal similar, midiendo la velocidad angular en referencia a un sistema de coordenadas seleccionado arbitrariamiente.
El tipo de IMU a utilizar variará de costo conforme sus sensores. Por ejemplo, aparte de los mencionados, algunos también incluyen magnetómetros, uno por cada eje, con los cuales se mide la orientación magnética. Para propósitos de este proyecto, la IMU estándar (3 giroscopios y 3 acelerómetros) nos sirve perfectamente, así que es la que usaremos. Un modelo muy conocido y de bajo costo es la MPU-6050 (ver figura 8) y por tanto será el modelo a usar en este proyecto.

Módulo de comunicación
Para controlar el dron, como es de suponer, necesitamos un sistema de comunicaciones a través del cual enviar los comandos al aparato. Tal sistema de comunicaciones contará con dos elementos: el transmisor, desde donde el usuario envía los comandos, y el receptor que va en la aeronave. De manera simple, el transmisor lee los comandos transmitidos con las palancas y botones que el usuario manipula y envía las señales de manera inalámbrica al receptor de forma aparentemente instantánea. El receptor en el dron recibe esta información y la transmite a su vez al módulo de control, el cual procesará estas señales y moverá la aeronave de acuerdo a ellas.
En general se usarán ondas de radio para esta comunicación, en la banda de 2.4 GHz. El sistema contará al menos con cuatro canales diferentes, uno por cada comando de las palancas (elevación, cabeceo o "pitch", alabeo o "roll" y guiñada o "yaw"), pudiendo incluir más canales para funcionalidades adicionales. El rango, o distancia de operación entre transmisor y receptor, suele ir desde unos cientos de metros hasta un kilómetro, variando en función de la potencia del transmisor, la sensibilidad del receptor y la calidad de las antenas en ambos extremos.
Es posible comprar transmisor y receptor por separado, teniendo en cuenta que el protocolo de comunicación que usen ambos sea el mismo para garantizar su compatibilidad. Sin embargo, se recomienda inicialmente adquirir el conjunto completo y con base en la experiencia, posteriormente ensayar otras opciones de combinaciones si así se considera. Existen gran variedad de opciones para el sistema de comunicación, pero así se utilice la opción más simple, este componente suele ser uno de los más costosos de la aeronave, por lo cual acá trabajaremos con la opción más sencilla.

Batería
Desde luego, todos los componentes electrónicos que hemos mencionado requieren ser alimentados desde alguna parte. Ese es el papel de la batería, la cual debe contar con la energía suficiente para alimentar todos los componentes y aún así ser lo más compacta posible. De todos los tipos de batería que existen, para nuestra aplicación las baterías que se han popularizado son las de polímero de litio o LiPo, que ofrecen una relativamente alta densidad de energía y eficiencia en comparación con otros tipos de baterías.
Hay dos factores de importancia al seleccionar la batería. En primera instancia, la corriente que puede suministrar, tanto en capacidad nominal como su valor máximo. Para ello, las baterías son denominadas con unas cifras, por ejemplo 5100mAh - 10C. En este caso, el primer número indica la capacidad nominal de corriente de la batería, en este caso 5100 miliamperios-hora (o 5.1 Ah). El segundo número es el valor de descarga, y permite obtener el máximo valor de corriente suministrada al multiplicarlo por la capacidad de la batería. En este caso, al multiplicar 5.1 por 10 tenemos 51 amperios, que puede entregar la batería en operación máxima. Teniendo en cuenta el consumo de los motores (principalmente) y del resto de la electrónica en general se sabe qué valor de corriente nominal y máxima se requieren. Evidentemente, al seleccionar una batería con los valores más altos posibles, esta será más pesada y costosa, por lo que conviene evaluar las condiciones de operación y seleccionar una batería apropiada sin excederse.
El otro criterio importante es la tensión (el voltaje) de operación de la batería. Estas baterías vienen en paquetes de celdas (usualmente de 3.7 V), siendo común usar baterías 2S o 3S (de dos o tres celdas), lo que sería equivalente a 7.4 V y 11.1 V respectivamente. De nuevo, a más tensión nominal, más potencia puede ser entregada, pero más peso y costo. Usualmente un buen criterio para decidir el número de celdas viene dado por el fabricante de los motores, que suelen entregar tablas experimentales donde recomiendan el tipo de batería a usar en función de la combinación motor - hélices que se vaya a usar.

Tarjeta de distribución
Todos los elementos mencionados reciben su alimentación de la batería. Sin embargo, aunque técnicamente es posible, no es nada práctico ni estético conectar cables de la batería a cada uno de los componentes. Por eso es necesario considerar algún elemento que permita distribuir la alimentación de una manera más ordenada. Es acá donde aparece la necesidad de una tarjeta de distribución como la que se observa en la figura 10, en la cual la batería solo se conecta a un punto (en este caso los cables que salen hacia arriba) y existen puntos de conexión para cada uno de los pares motor - variador. Solo se consideran estos elementos dado que son los más demandantes en términos de corriente (por ello los cables son tan gruesos) y además sólo ellos pueden recibir alimentación directa de la batería. Se asume que los demás elementos, como la tarjeta de control, los sensores y el sistema de comunicación, reciben su alimentación de otra parte, usualmente el BEC de alguno de los variadores.
Sin embargo, este elemento no siempre es necesario. Recordemos que cuando hablamos del marco, mencionamos que algunos incluyen rutas de distribución embebidas dentro de su misma estructura, como es el caso de las rutas doradas en el marco mostrado en la foto 2. En consecuencia, el uso de esta tarjeta distribuidora puede ahorrarse bajo esta circunstancia.

Materiales varios
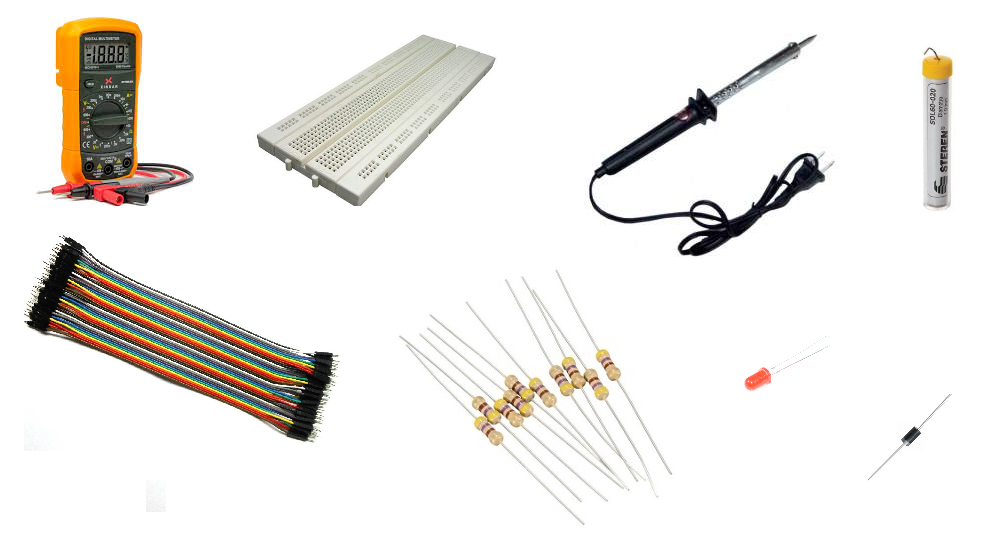
Aparte de los anteriores, que son propiamente componentes del dron, requerimos algunos materiales e instrumentos adicionales para su construcción, para la integración de sus componentes y para las respectivas pruebas. He acá una lista, no necesariamente exhaustiva, de algunos elementos que llegaremos a necesitar en determinado momento de este proceso:
- Multímetro: Útil para verificar continuidad al realizar las conexiones, para medir voltajes y corrientes en el proceso.
- Cautín y soldadura de estaño: Serán requeridos precisamente para soldar algunas conexiones entre componentes, como pueden ser los motores, los ESCs, los conectores de la batería y todo el cableado a nuestro marco o tarjeta de distribución.
- Cables y jumpers: Indispensables para las conexiones de los componentes electrónicos al Arduino.
- Protoboard: No es indispensable, pero puede ser útil para la prueba individual de algunos componentes, como el caso de la IMU.
- Resistencias: Requeriremos algunas, específicamente para la medición del nivel de la batería y para limitar la corriente al LED.
- LED: Proveerá una indicación visual del estado de nuestro dron.
- Diodo: Lo usaremos para aislar el suministro de alimentación de la batería de otras fuentes de alimentación eventuales, como el puerto USB del computador durante las pruebas y programación o el BEC de los ESCs.